WLKATA ROBOTICS
Educational Solution
For University
Solution I
Modulated Training Cells For University
Learning Robotics Fundamentals With Arduino, RS485 & PLC
For researchers, university educators, and students who study AI and robotics, WLKATA provides a series of modulated mini-production lines. These laboratory training platforms change the tedious study of algorithms and mechanisms into an interactive, exciting, and practical learning process.

| HIGHER EDUCATION & RESEARCH
A Professional Research Platform For Higher Education
Based on the technologies of Bus-mastering control PLC, open-source API, and desktop robot arms, WLKATA provides an ideal robotics research platform for educators and students in higher educational institutes.

-

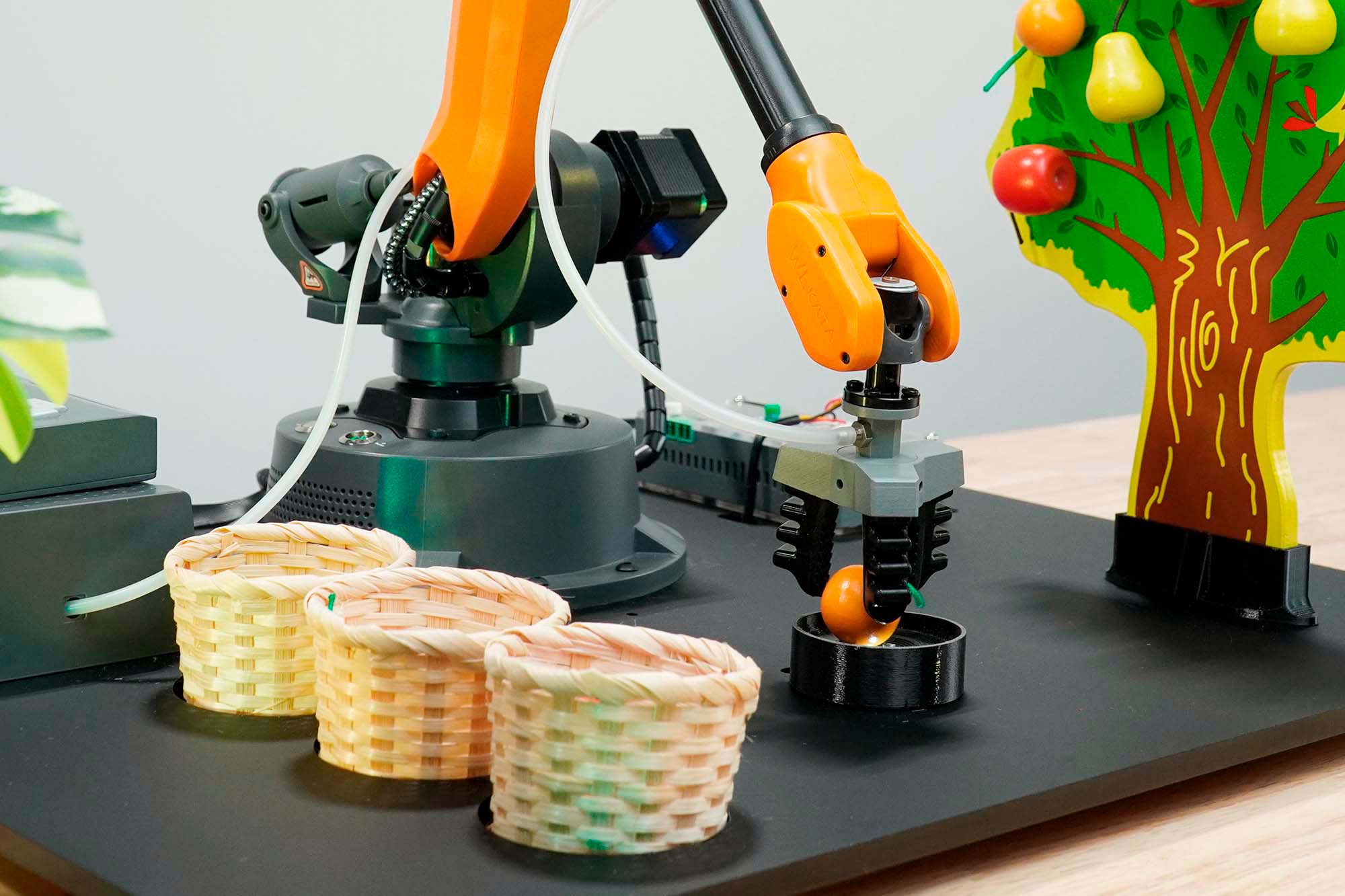
Fruit Picking Line
View Solution → -


AI Automatic Sorting Line | Mirobot Training Cell|
View Solution →




-
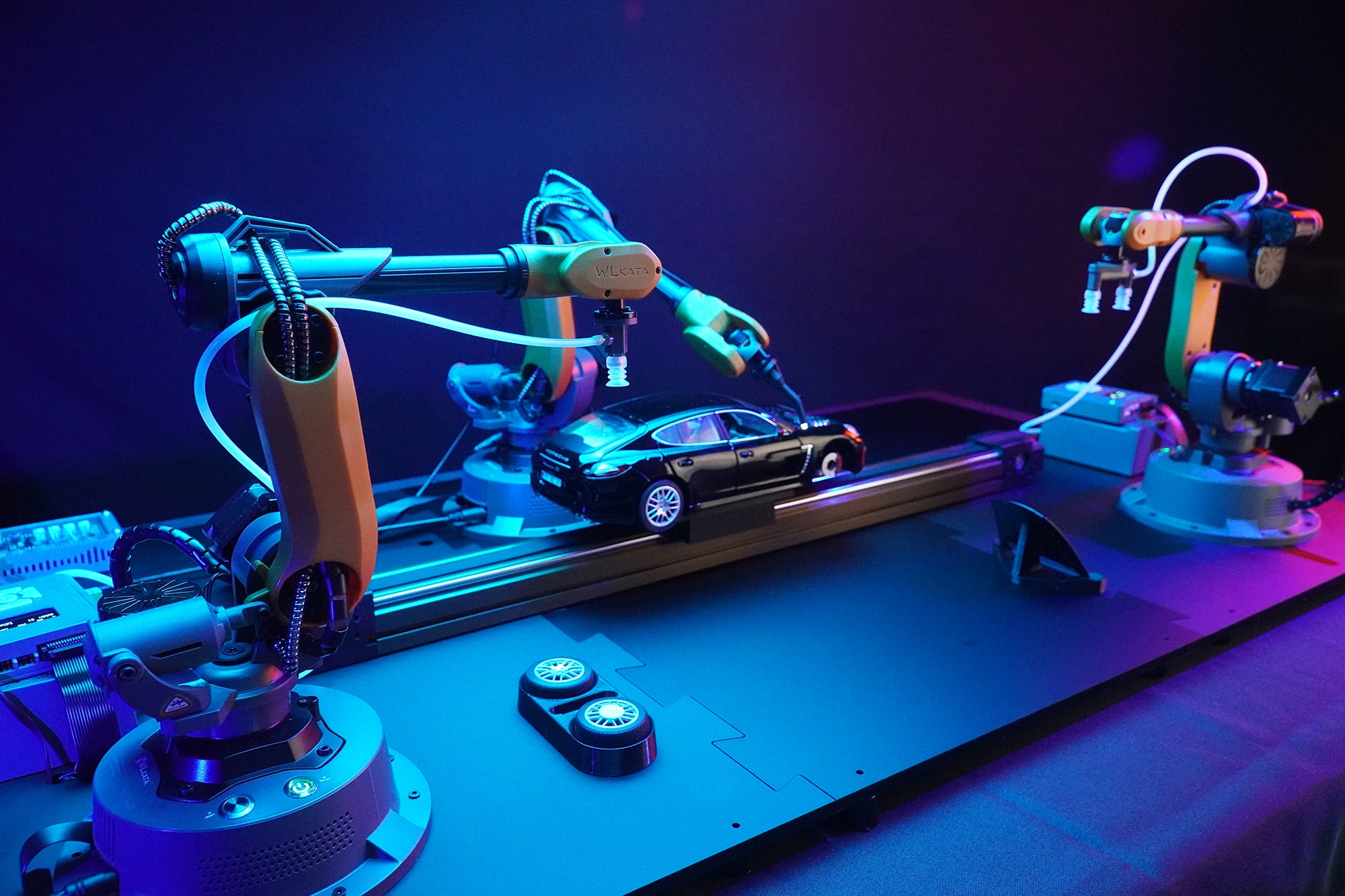
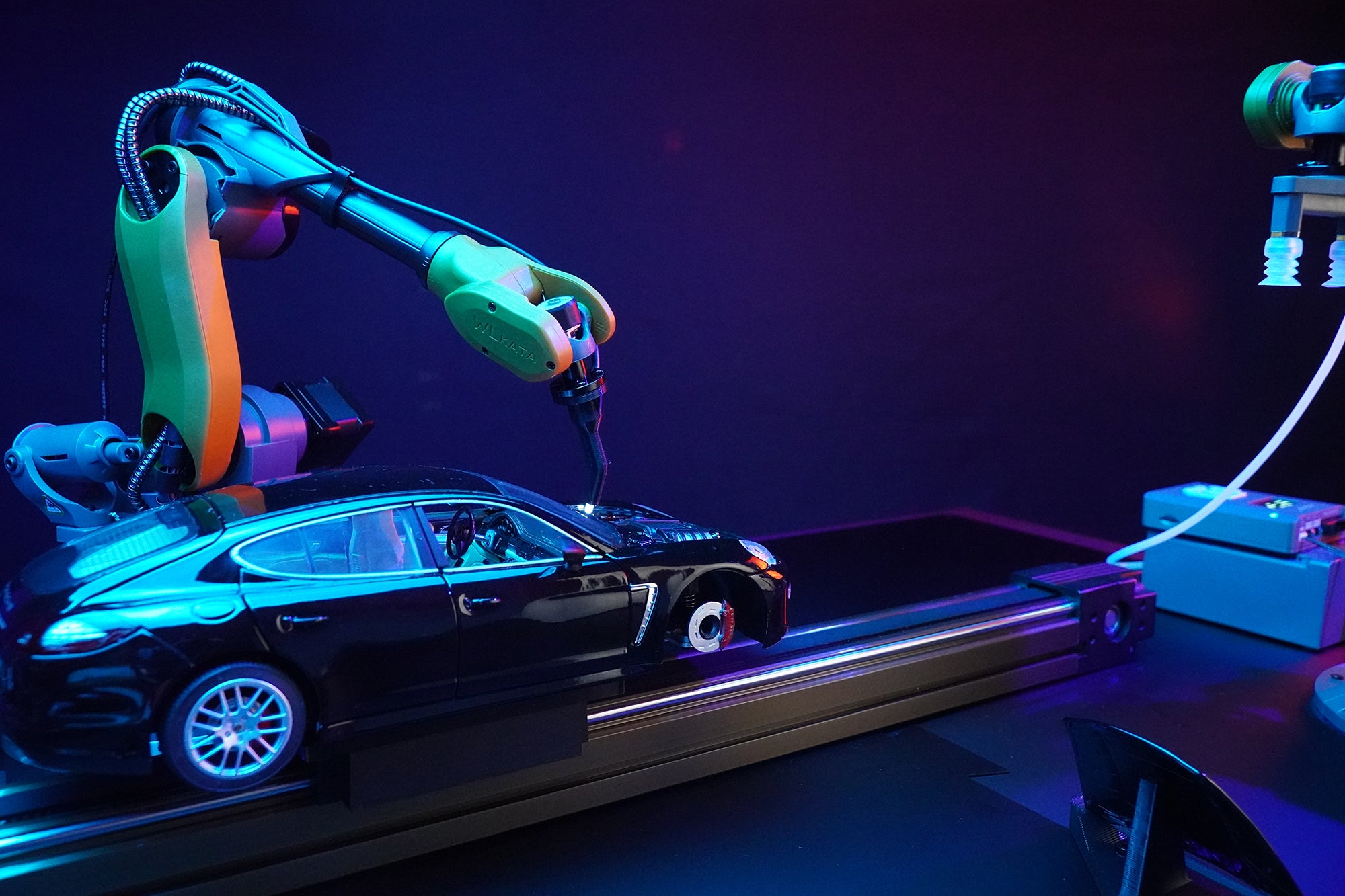
Automobile Assembly Line |Mirobot Training Cell|
View product → -

Wlkata AI Vision Set
View product →





Solution II
Courses With Textbooks For University
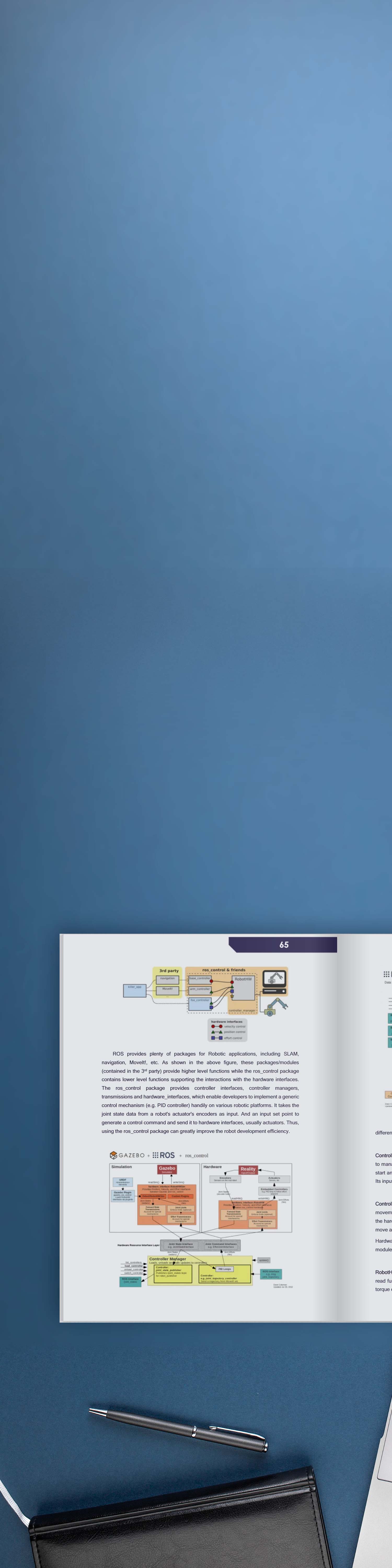
Learning Robotics Development With ROS, Matlab and VRep Courses with Textbooks
To students and researchers work on robotics development and platforms such as ROS, V-rep, and Matlab, WLKATA provides a series of curriculums based on robotic arm, 3D simulation and step-by-step experiment tutorials. It greatly helps the students to realize the synchronization between virtual simulation and robotics development in the real world.
| Textbook A |
|| ROBOTICS Planning, Control and Innovation ||
— Experiments Based on WLKATA Mirobot
Author : WLKATA ROBOTICS
| Study Level |
| University / College |
(Recommended for the sophomore or junior year.)
| Duration |
25 Weeks
| Content |
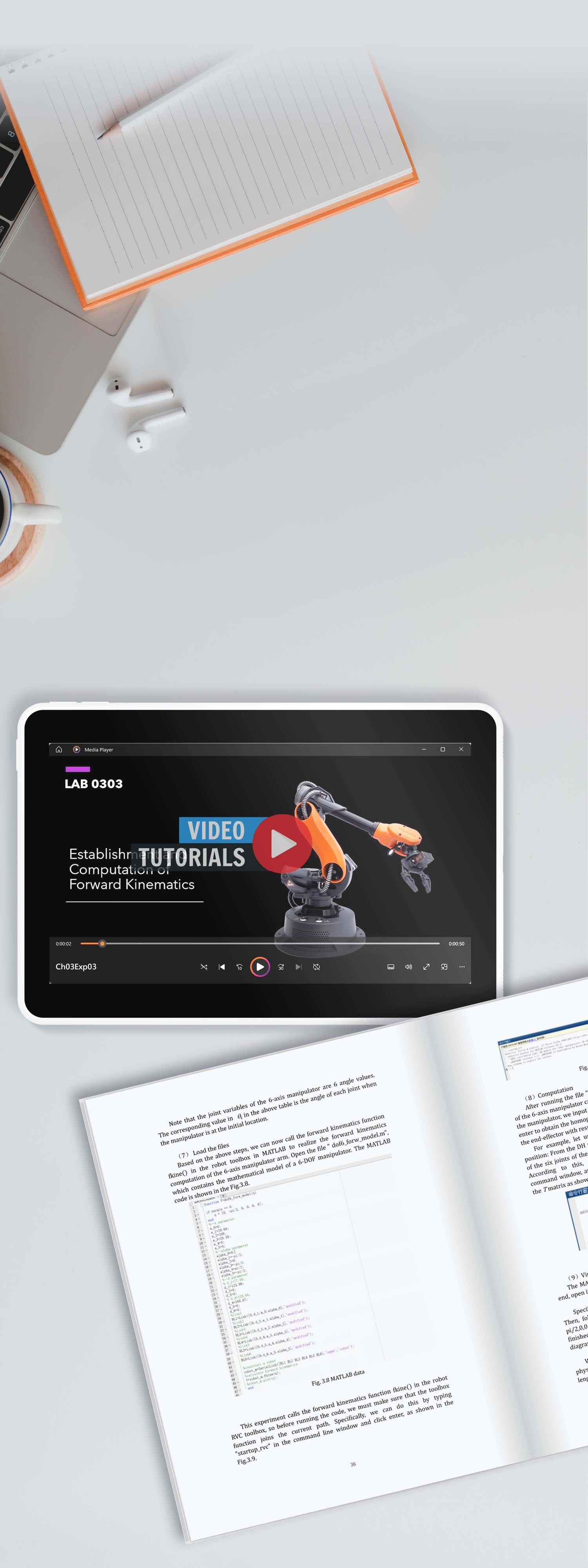
I. A textbook
II More than 10 supporting experiments with video tutorials
III. Experiments code and models
| Software Requirement |
V-rep, Matlab
Most of the experiments in this course require the V-rep (CoppeliaSim) and/or Matlab
| Learning Objective |
Fullu understand the principle of a typical 6-axis robotic arm development concepts and process, including:
✔️ Mathematical basis of robots
✔️ Forward kinematic analysis of robots
✔️ Calculation and control of robot inverse kinematics
✔️ Robot dynamics and control
Combined with the Mirobot robotic arm, this course teaches robotics development fundamentals at an university level.

| Textbook Outline |
Chapter 1
Introduction
1.1 Initial Knowledge on Industrial Robots
1.2 Robot Simulation System
Chapter 2
Transformation
2.1 Transformation in Virtual Laboratory
2.2 Transformation Matrix into Euler Angles
2.3 Painting Demonstration and Frame Transformation in 2-Dimensional Space
2.4 Frame Transformation by Changing the Frame of the End-effector
Chapter 3
Kinematics
3.1 Forward Kinematics
3.2 Co-simulation of Forward Kinematics with MATLAB and V-REP
3.3 Establishment and Computation of Forward Kinematics
3.4 Inverse Kinematics Modeling
3.5 Inverse Kinematics Computation and Co-simulation in MATLAB
3.6 Inverse Kinematics Solution and Co-simulation
Chapter 4
Static
4.1 Static Computation Frame in 3D Deduction
4.2 Statics Computation of Manipulator
Chapter 5
Dynamics
5.1 Dynamics Computation Frame 3D Deduction
5.2 Dynamics Computation of the Manipulator
Chapter 6
Motion Control
6.1 Design of Driving Joint of Manipulator
6.2 Stepper Motor
Chapter 7
Motion Planning
7.1 Motion Planning for Given Initial and Final Point
7.2 Motion Planning Given Initial Point, Final point and Intermediate Point
7.3 Example on Motion Planning of the Manipulator
7.4 Continuous Trajectory Motion Planning
Chapter 8
Application of Control Algorithm for 6-axis Desktop Manipulator
8.1 Grasping Object Experiment Base on Inverse Kinematics
8.2 Desktop Robotic Arm Painting Using Motion Trajectory Planning
8.3 Laser Engraving via Robotic Arm
8.4 Grasp Objects Based on Color Recognition

| Textbook B |
|| Developing Robot With ROS Noetic ||
— A Manual of Experiments Based on WLKATA Mirobot
Author : WLKATA ROBOTICS
| Study Level |
| University / College |
(Recommended for the sophomore or junior year.)
| Duration |
25 Weeks
This course book covers the ROS Noetic software framework and the basic functions of ROS, together with the development process of Mirobot robotic arm in ROS by introducing the function cases of e.g., robot arm motion control, machine voice, and machine vision.
| Learning Objective |
Fully understand the principle of ROS control and the development of a typical 6-axis robotic arm in ROS, including:
✔️ ROS robotic arm modeling
✔️ Controlling Mirobot with Moveit
✔️ Calculation and control of robot inverse kinematics
✔️ Robotic feature expansion


| Textbook Outline |
Chapter 1
Getting to Know ROS
The Origin, Design Goals and Characteristics Of ROS
Chapter 2
Installation of ROS
The Installation of Ubuntu and ROS
Chapter 3
The Fundamentals of ROS
ROS Architecture; Create A ROS Feature Package; ROS Node; Learn about ROS Topics, ROS Services and Parameters; Use roslaunch; Create ROS Msg and Srv; Write A Simple Publisher and Subscriber in C++; Run Publishers and Subscribers; Write A Simple Service and Client In C++
Chapter 4
ROS Robotic Arm Modeling
4.1 Introduction to URDF Models
4.2 3D Model Export URDF
4.3 Processing of URDF Files Exported by Mirobot Robotic Arm in Solidworks
Chapter 5
Mirobot Robotic Arm Controls in ROS
5.1 Mirobot Communication Protocols
5.2 ROS and Mirobot Communication Implementation
Chapter 6
Import Mirobot to Moveit
6.1 Introduction to Moveit
6.2 Moveit Configuration - Setup Assistant
6.3 Import Mirobot Model into Gazebo Simulation Environment
Chapter 7
Controlling Mirobot with Moveit
7.1 Use Moveit to Control Robotic Arm
7.2 Simulating Motion Using The Moveit Control Model (Python)
7.3 Controlling Really Robotic Arm Movements With Moveit (C++)
Chapter 8
Mirobot Feature Expansion
8.1 Recording and Playback of Robotic Arm Motion Data
8.2 Add an End Effector to Model
8.3 Add A Camera to Model to Get Image Information
8.4 Add Kinect to Model to Get Point Cloud Information
8.5 Add A Force Transducer to The Model to Collect Simulation Data
8.6 Add Speech Recognition for Robotic Arms